
Mathematics-Online lexicon:
|
|
[home] [lexicon] [problems] [tests] [courses] [auxiliaries] [notes] [staff] |
|
|
Mathematics-Online lexicon: | ||
Orthogonal Basis | ||
| A B C D E F G H I J K L M N O P Q R S T U V W X Y Z | overview |
![\includegraphics[width=.7\linewidth]{a_on_basis}](/inhalt/aussage/aussage489/img5.png)
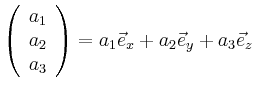
As illustrated in the figure, any vector ![]() can be represented by a linear combination
can be represented by a linear combination
The addends are the projections of ![]() onto the axes generated by the vectors of the ONB.
For the coefficients we have
onto the axes generated by the vectors of the ONB.
For the coefficients we have
In particular, we have
see also:
| automatically generated 3/17/2011 |