
Mathematics-Online course: Linear Algebra - Analytic Geometry - Orthogonal Groups
|
|
[home] [lexicon] [problems] [tests] [courses] [auxiliaries] [notes] [staff] |
|
|
Mathematics-Online course: Linear Algebra - Analytic Geometry - Orthogonal Groups | ||
Rotation Axis and Angle | ||
| [previous page] [next page] | [table of contents][page overview] |
With respect to an orthonormal right-handed coordinate system ![]() , the matrix
representation of
, the matrix
representation of ![]() is given by:
is given by:
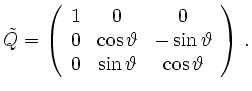
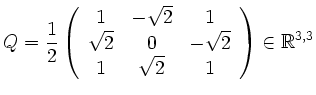
 .
.
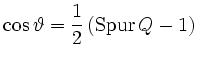
To compute ![]() you compute the angle between an unit vector
you compute the angle between an unit vector ![]() with
with ![]() and the unit vector
and the unit vector ![]() .
.
| automatically generated 4/21/2005 |