
Mathematics-Online lexicon: Annotation to
|
|
[home] [lexicon] [problems] [tests] [courses] [auxiliaries] [notes] [staff] |
|
|
Mathematics-Online lexicon: Annotation to | ||
Affine Approximation of Point Clouds | ||
| A B C D E F G H I J K L M N O P Q R S T U V W X Y Z | overview |
A best Euclidean approximation of points
![\includegraphics[width=0.7\linewidth]{Bild_approx_point_clouds}](/inhalt/aussage/aussage1456/img5.png)
The optimal affine subspace ![]() is characterized as
follows.
The point
is characterized as
follows.
The point ![]() is the center of the points
is the center of the points ![]() ,
,
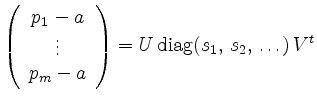
The error can be expressed in terms of the singular values:
| automatisch erstellt am 19. 8. 2013 |